Projects
| Journal Papers | |
|---|---|
 |
“A geometric approach to robotic laundry folding” Stephen Miller, Jur van den Berg, Mario Fritz, Trevor Darrell, Ken Goldberg, Pieter Abbeel International Journal of Robotics Research (IJRR), December 2011 [pdf] [bibtex][errata] ——— Brief: Vision and planning pipelines for a laundry folding robot |
| Refereed Conference Papers | |
 |
“Elastic Fragments for Dense Scene Reconstruction” Qian-Yi Zhou, Stephen Miller, Vladlen Koltun ICCV 2013, Sydney, Australia [pdf] [bibtex] ——— Brief: 3D models from Kinect data, by bending clouds until they snap together. Oral Acceptance. |
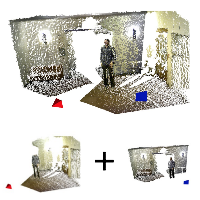 |
“Unsupervised extrinsic calibration of depth sensors in dynamic scenes” Stephen Miller, Alex Teichman, Sebastian Thrun IROS 2013, Tokyo, Japan [pdf] [bibtex] ——— Brief: Calibrate multiple kinects together by watching people move |
 |
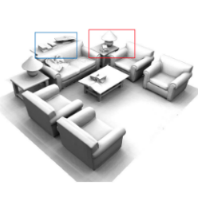
“Free Your Camera: 3D Indoor Scene Understanding from Arbitrary Camera Motion” Axel Furlan, Stephen Miller, Domenico G. Sorrenti, Li Fei-Fei, Silvio Savarese BMVC 2013, Bristol, United Kingdom [pdf] [bibtex] ——— Brief: 3D room blueprints from a cellphone camera |
 |
“Unsupervised intrinsic calibration of depth sensors via SLAM” Alex Teichman, Stephen Miller, Sebastian Thrun RSS 2013, Berlin, Germany [pdf] [bibtex] ——— Brief: Undistort Kinect depth maps by walking around a room |
 |
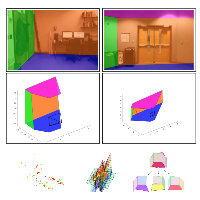
“Object Discovery in 3D Scenes via Shape Analysis” Andrej Karpathy, Stephen Miller, Li Fei-Fei ICRA 2013, Karlsruhe, Germany [pdf] [bibtex] ——— Brief: Build object models from unlabeled KinectFusion scans |
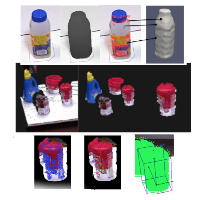 |
“A Textured Object Recognition Pipeline for Color and Depth Image Data” Jie Tang, Stephen Miller, Arjun Singh, Pieter Abbeel ICRA 2012, St Paul, MN, USA [pdf] [bibtex] ——— Brief: Instance- and pose- recognition from kinect scans. Finalist for Best Robotic Vision Award (ICRA 2012) |
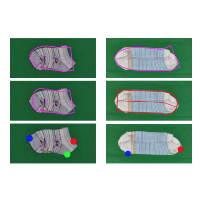 |
“Perception for the Manipulation of Socks” Ping Chuan Wang, Stephen Miller, Mario Fritz, Trevor Darrell, Pieter Abbeel IROS 2011, San Francisco, CA, USA [pdf] [bibtex] ——— Brief: Vision methods which let a robot pair and fold socks |
 |
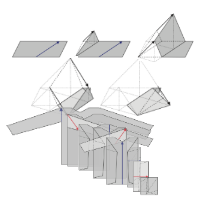
“Parametrized Shape Models for Clothing” Stephen Miller, Mario Fritz, Trevor Darrell, Pieter Abbeel ICRA 2011, Shanghai, China [pdf] [bibtex] ——— Brief: Perception tools which help a robot fold laundry |
 |
“Bringing Clothing into Desired Configurations with Limited Perception” Marco Cusumano-Towner, Arjun Singh, Stephen Miller, James F. O’Brien, Pieter Abbeel ICRA 2011, Shanghai, China [pdf] [bibtex] ——— Brief: Active perception approach for spreading out crumpled clothes |
 |
“Gravity-Based Robotic Cloth Folding” Jur van den Berg, Stephen Miller, Ken Goldberg, Pieter Abbeel WAFR 2010, Singapore [pdf] [bibtex] ——— Brief: Laundry folding pipeline, minus perception |
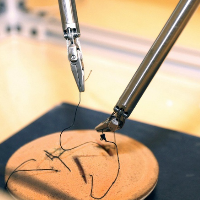 |
“Superhuman Performance of Surgical Tasks by Robots using Iterative Learning from Human-Guided Demonstrations” Jur van den Berg, Stephen Miller, Daniel Duckworth, Humphrey Hu, Andrew Wan, Xiao-Yu Fu, Ken Goldberg, Pieter Abbeel ICRA 2010, Anchorage, AL, USA [pdf] [bibtex] ——— Brief: Surgical robot learns to tie knots by watching people do it. Winner of the Best Medical Robotics Paper Award (ICRA 2010), and Longest Title Award (Citation Needed). |
| Refereed Workshop Papers | |
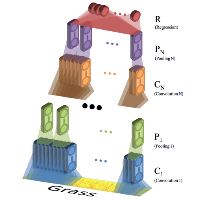 |
“Word-level Acoustic Modeling with Convolutional Vector Regression” Andrew Maas, Stephen Miller, Tyler O’Neil, Andrew Ng, Patrick Nguyen ICML 2012 Workshop on Representation Learning, Edinburgh, Scotland [pdf] [bibtex] ——— Brief: Trained a conv net for speech-to-text translation |